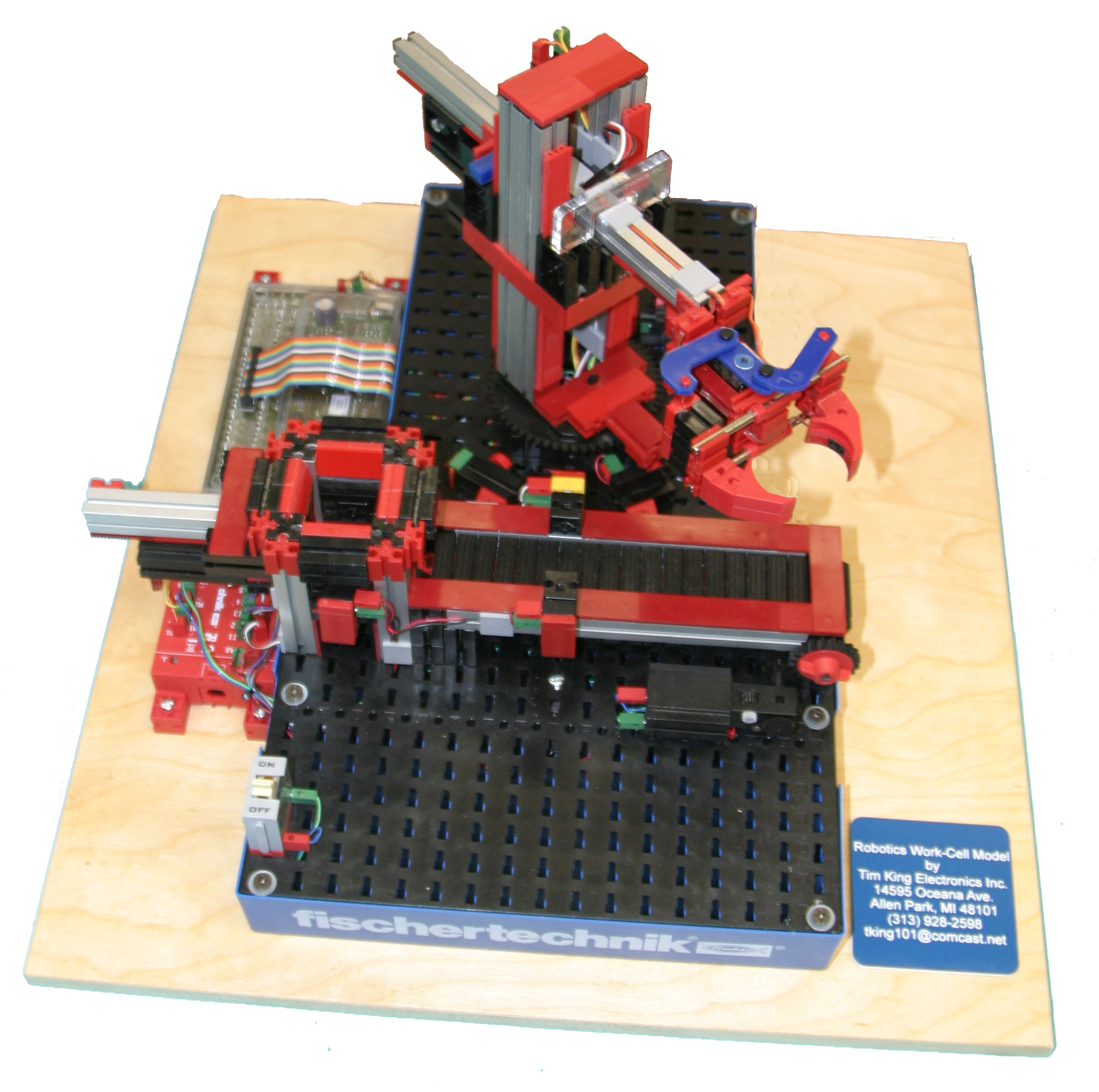
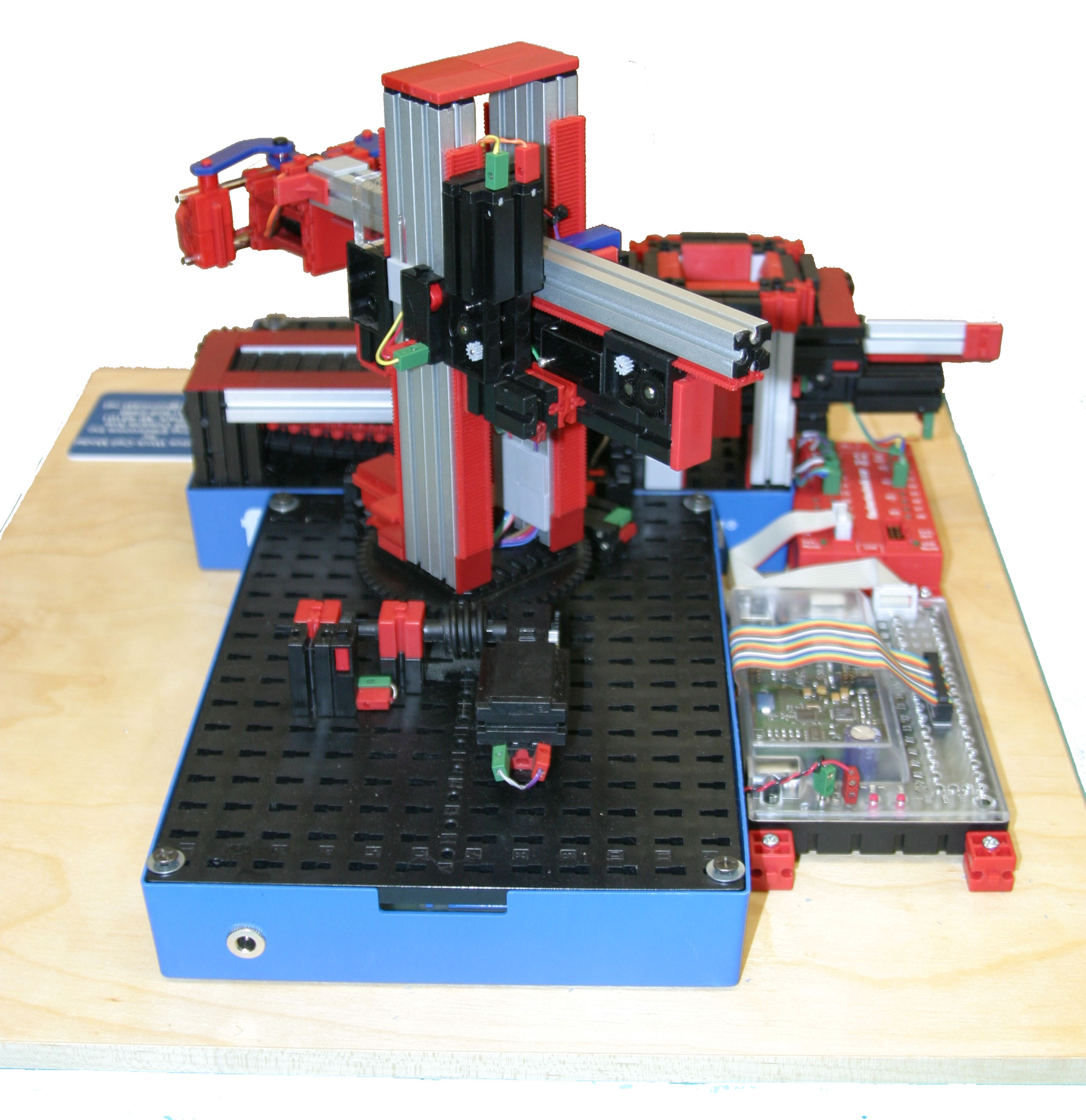
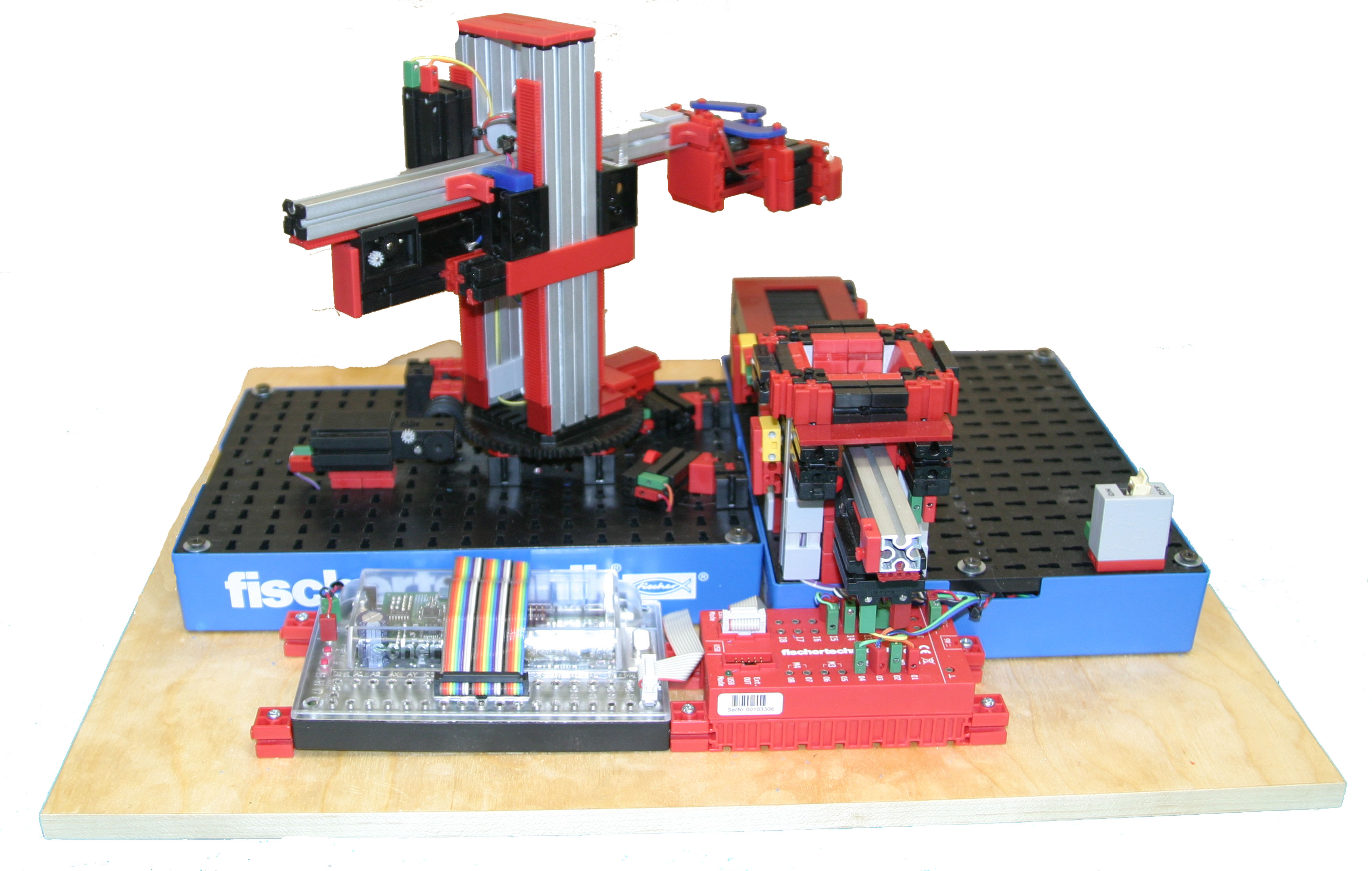
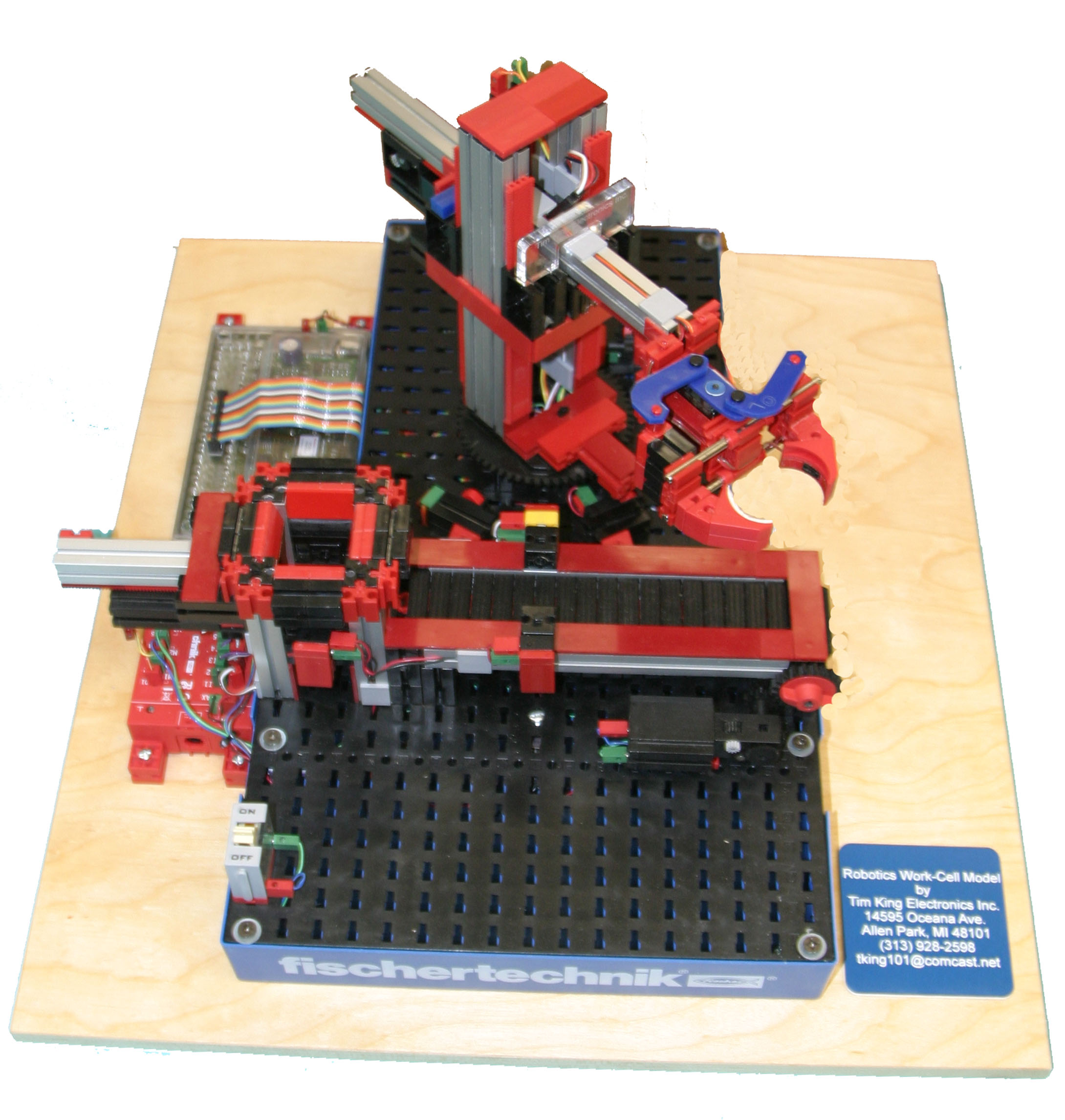
The Three Axis Robot model is equipment with a special “servo driven” gripper. There are three motors for controlling the first three axis of the robot. Each axis has a home limit switch and out or “work” position limit switch. Up and down, cw and cww, and arm movement from out to home positions. The gripper is design with a special control board that will allow any 12vdc output to either open or close the gripper. The gripper also contains a part detect switch built into the gripper claw so that your system can detect when a part is in the gripper. This give the programmer feedback that the robot has a part and is ready to be moved. The Three Axis Robot Model is mounted to ˝” Birch plywood base with a section of conveyor belt model.
Features:
- ”Y” axis has a home limit switches, part pick up limit switch, and outer limit switch
- ”X” axis has a home limit switch, and a outer limit switch
- Rotation home switch with two moveable limit switches for user control points
- Servo pick-up system (with special interface circuit board that can adjust open and close points on gripper claws
- Compatible with the 30547 16 input / 16 output fischertechnik interface
- Compatible with the 30548 24 volt dc, 8 input / 8 output plc system with interface board
- This a add-on model and does connect with any other Project Lead the Way model system
- This model can be program with fischertechink RoBo Pro software & interface
Options:
- Programmable controller interface (24 volt dc system)
- Programming for Allen Bradley SLC-500 Programmable controllers
- Compatible with the Robo Pro Interface with I/O Extension Interface & software
|
 |
| Technical Data |
Technical Support |
Interfacing requirements:
Data Inputs:
- 8 Limit Switches
- 1 IR Sensor
Control Outputs:
- 4 Reversing Motors
- 1 Servo Control
|
- PLC Addressing Sheet
- RoBo Pro Software Compatible
- PLC Model Layout Diagrams
|
|
|